Eventuelle kjevler (dvs. svinger) ved å bruke et nettomoment. Det som er interessant med et quadcopter er ikke bare hvordan det gjesper, men hvordan det gjesper og ikke ruller, pitcher eller klatrer samtidig .
For å forstå hvordan dette fungerer, må vi kort se på matematikken. Vi bruker en pluss-konfigurasjon, men egentlig fungerer alle mutirotor-konfigurasjoner.
Tingen å beholde i tankene er at skyvekraft og dreiemoment er relatert til propellhastigheter. Hvis du setter fart på en propell, er det intuitivt åpenbart at det vil skape mer trykk. Og hvis du snurrer det raskere, trenger du mer dreiemoment. Så endring av motorhastigheter endrer nettokreftene og dreiemomentene på flyrammen.
(Pedantisk går det med kvadratet av hastighet. Så hvis du dobler hastigheten, firdobler du skyvekraft og dreiemoment. Men det er ikke viktig for denne analysen.)
Her er kjøreligningen på høyt nivå. Hvis du noen gang har rotet med miksere, vil du legge merke til at 4x4-matrisen i midten ser veldig kjent ut:

Hva dette gjør at det kartlegger rotorhastigheter (kvadrat) til dreiemoment rundt vals-, stig- og giraksene, samt netto vertikal skyvekraft.
For å sveve, la oss anta at alle motorer snurrer med samme hastighet , W . Så W = w1 = w2 = w3 = w4
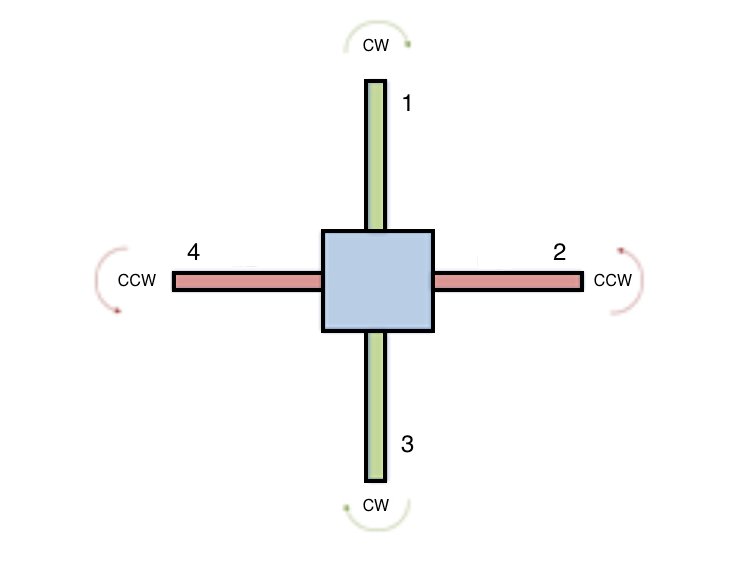
Yaw
Hva skjer hvis vi fremskynder den første og tredje og bremser den andre og fjerde med samme (kvadrat) mengde dW ?
moment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW ) = 0 moment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0 moment_y = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 4 * dWF_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Så nettokraften endres ikke (all dW avbrytes), og ikke nettet ruller og pitcher, men voila vi har 4 * dW verdt dreiemoment!
For fullstendighet, her er hva som skjer når du også vil endre de andre aksene.
Pitch
La oss bytte fremre og bakre motorer med samme (kvadrat) hastighet, men vi lar de to andre motorene være alene:
moment_x = 0 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 2 * dWtorque_y = 1 * (W ^ 2 + 0) + 0 * (W ^ 2 - dW) - 1 * (W ^ 2 + 0) + 0 * ( W ^ 2 + dW) = 0 moment_z = 1 * (W ^ 2 + 0) - 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + 0) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) = 4 * W ^ 2
Legg merke til at igjen, z-skyvekraft forblir konstant, men denne gangen vises bare et pitching moment.
Rull
La oss endre venstre og høyre motor ved å samme (kvadrat) hastighet, men vi lar de to andre motorene være i fred:
moment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0 moment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + 0) - 1 * (W ^ 2 + dW ) + 0 * (W ^ 2 + 0) = 2 * dMoment_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + 0) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + 0) = 4 * W ^ 2
Som alltid igjen, forblir z-stød konstant, men denne gangen vises bare et rullende dreiemoment.
Støtte
Til slutt, hva skjer hvis vi fremskynder alle fire motorene med samme (kvadrat) hastighet?
moment_x = 0 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0 moment_y = 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 0 * (W ^ 2 + dW) = 0 moment_z = 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) - 1 * (W ^ 2 + dW) = 0F_z = 1 * (W ^ 2 + dW) + 1 * (W ^ 2 - dW) + 1 * (W ^ 2 + dW) + 1 * (W ^ 2 + dW) = 4 * W ^ 2 + 4 * dW
Så bare i dette tilfellet ser vi en økning i vertikal skyvekraft (med 4 * dW ). Legg merke til hvordan nettmomentet rundt hver akse avbrytes.